
Wheel location logic
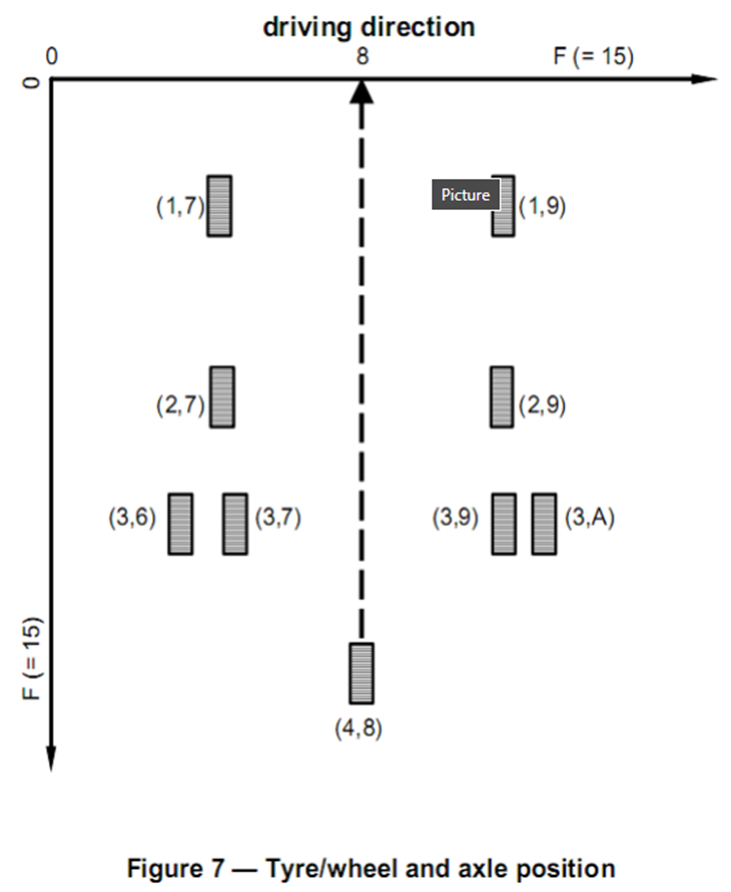
The wheels are calculated from the mid-point 8, that means there is no wheel number 8. All the wheels will go from 0-7 or 9-F (15 in hexadecimal).
Also, the number of the wheel location also start from the mid-point, decreasing when on the left of mid-point and increasing when on the right. That means, when we have one wheel on the left it will have the number 7, if we add a second wheel in the same axle on the left side it will have the number 6 and so on.
When we have one wheel on the right it will have the number 9, if we add a second wheel in the same axle on the right side it will have the number A (10) and so on.
The following diagrams should help in understanding the Scalar format for wheel location.
Examples
- from integer to wheel position
- Decimal = 39; hex = 27 ==> axle 2, first wheel to the left
- Decimal = 41; hex = 29 ==> axle 2, first wheel to the right
- Decimal = 54; hex = 36 ==> axle 3, second wheel to the left
- Decimal = 58; hex = 3A ==> axle 3, second wheel to the right
from wheel position to integer
- axle 1, third wheel to the left = 21. In hexadecimal it is 15 (1 stands for axle 1 and 5 stands for third wheel, considering the first one has number 7, the second one has number 6 and so on). Converting 15 from hex to dec, we obtain 21
- axle 5, fifth wheel to the left = 83. Converting the position in hexadecimal we have 5 as first digit due to the axle 5; then we have 3 as second digit by considering the part in bold: 7 = wheel 1; 6 = wheel 2; 5 = wheel 3; 4 = wheel 4; 3 = wheel 5; 2 = wheel 6; 1 = wheel 7; = wheel 8. Then, by converting 53 from hex to dec, we obtain 83
- axle 1, fourth wheel to the right. The value is 28. We take 1 as first digit for the axle; then we take C because is the fourth wheel (9= wheel 1; A = wheel 2; B = wheel 3; C = wheel 4; D = wheel 5; E = wheel 6; F = wheel 7). Then, converting 1C from hex to dec, we obtain 28
- axle 4, first wheel to the right. 49 is the hexadecimal representation (4 for axle 4 and 9 for wheel 1 to the right). Converting it to decimal we obtain 73
Value mapping
Some properties contains a value as string which is mapped to an enumerator. In this section we document all the enumeration used by the sensor module
Pressure threshold status enum values
- extremeOverPressure
- overPressure
- normal
- underPressure
- extremeUnderPressure
Power Mode values
- invalid
- diesel
- electric
Operating Mode values for each zone
- invalid
- powerOn
- powerOff
- cooling
- heating
- defrost
- pretrip
- irregularShutdown
- compulsoryShutdown
- thermostatOff
- sleep
- diagnostics
Reefer Operating Mode values
- invalid
- cycleSentry
- continuous
Propulsion Charging Status values
- notCharging
- charging
- unknown
Battery Pack Level values
- critical
- low
- medium
- high
- full
Battery Pack Charging State values
- notCharging
- charging
- fullyCharged
Battery Pack Not Charging Reason values
- noPower
- temperatureIssue
- error
Measuring Units
Measuring unit define the metric unit that is applicable to the sensor value. If it cannot be defined, N/A will be returned. Here is the list of possible values:
- N/A → Not Applicable
- kilometer → Distance
- kilometers/hour → Distance/Hour (speed)
- kilogram → Weight
- hour → Time
- degree → Angle (min = 0°, max = 360°)
e.g. heading = angle of positioning
- celsius → Temperature in °C
- liter → Volume
- kilopascal → Pressure
- volt → Voltage (min = 9V, max = 32V)
- millivolt → Voltage - 1/1000 of a volt
- kilowatt → Unit of Power
- kilowattHour → KWh - Kilowatts measured within an hour
Special Cases
- position
- percentage → (min = 0, max = 100)
- amount → defines the amount of data
e.g. satCount = number of satellites
Updated about 1 year ago